BRICK Modeling Format
- Project
- 19027 AIToC
- Type
- New standard
- Description
BRICK (working title) is a language developed for designing models that are deep, extendable, hierarchical and reusable. With BRICK bundles it is possible to extend the language for domain specific modeling.
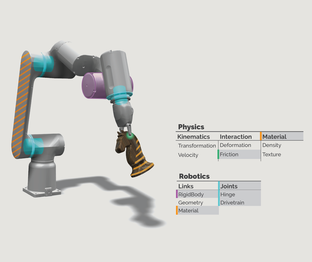
In AIToC we have both developed the language and specific BRICK bundles specialized for physics and robotics modeling.
With the physics bundle it is possible to describe advanced mechanical systems with physical parameters for simulation. The bundle has built-in features to enable reinforcement learning for machine control.
The format is readable and writable for humans and machines.
- Contact
- Sandra Ålstig
- sandra.alstig@algoryx.com
- Research area(s)
- Robotics, machine control, physics simulation.
- Technical features
BRICK enables:
- Domain specific modeling
- Arithmetic expressions
- Variable initial states
- Batch simulations
- Integration constraints
The BRICK core language source code is intended to be open source and designed for integration in any framework. It is written in C++ with bindings to both python and C#.
Same goes for the physics and robotics specific bundles.
- Targeted customer(s)
Robotics, autonomous machines or any industry with the need for modeling with physics.
- Conditions for reuse
The goal is to make BRICK an open source project.
Instructions on how to test BRICK are found at https://www.algoryx.com/projects/brick/. AGX Dynamics has implemented a BRICK reader which can be tested with AGX software and license (https://www.algoryx.com/agx-dynamics/).
- Confidentiality
- Public
- Publication date
- 18-01-2024
- Involved partners
- Algoryx Simulation (SWE)